Definition(s)
Safe State
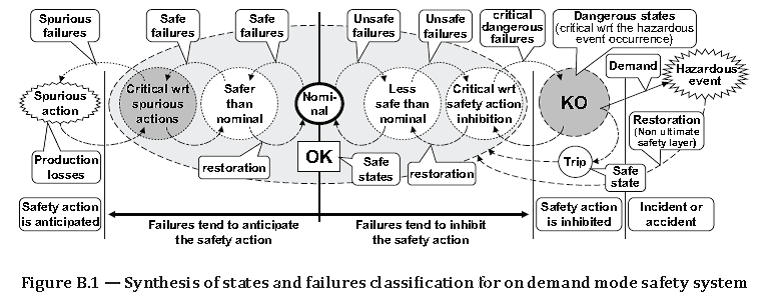
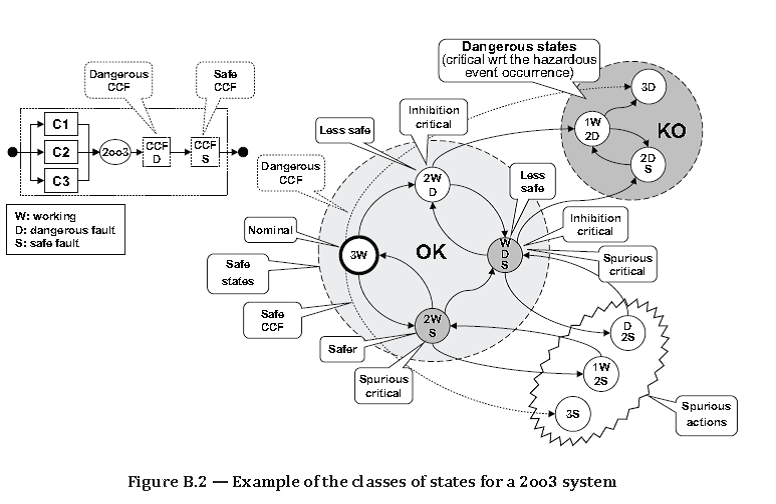
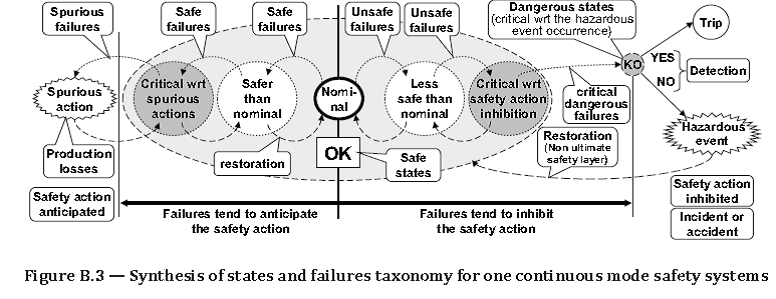
state of the process when safety is achieved
Note 1 to entry: Some states are safer than others (see Figures B.1, B.2 and B.3) and in going from a potentially
hazardous condition to the final safe state, or in going from the nominal safe condition to a potentially hazardous
condition, the process may have to go through a number of intermediate safe-states.
Note 2 to entry: For some situations, a safe state exists only so long as the process is continuously controlled. Such
continuous control may be for a short or an indefinite period of time.
Note 3 to entry: A state which is safe with regard to a given safety function may increase the probability of
hazardous event with regard to another given safety function. In this case, the maximum allowable spurious trip
rate (see 10.3) for the first function should consider the potential increased risk associated with the other function.
Source: ISO/TR 12489:2013(E). Global Standards